

O motor elétrico representa um dos avanços mais significativos na história da engenharia elétrica. Esta máquina eletrotécnica converte energia elétrica em energia mecânica, acionando o movimento de diversos dispositivos e máquinas. Seu funcionamento é essencialmente o oposto de um gerador elétrico, que converte energia mecânica em energia elétrica.
O conceito de motor elétrico foi consolidado graças às descobertas fundamentais de pioneiros como Franz Ernst Neumann e James Clerk Maxwell em 1841 e 1873, respectivamente. Esses cientistas lançaram as bases teóricas que permitiram o desenvolvimento e a aplicação prática de motores elétricos em diversas indústrias e áreas da vida cotidiana.
Desde então, os motores elétricos revolucionaram a forma como interagimos com a tecnologia moderna, alimentando uma ampla gama de dispositivos e sistemas, desde eletrodomésticos até máquinas industriais de grande escala. A sua versatilidade e eficiência tornam-nos elementos indispensáveis na era da eletrificação, contribuindo para o progresso e a inovação em todo o mundo.
Tipos de motres eléctricos
Os motores elétricos são categorizados principalmente com base no tipo de corrente elétrica que usam:
1. Motores de corrente contínua (CC)
Os motores DC usam uma fonte de energia DC para operação. Esses motores são amplamente utilizados em diversas aplicações devido à sua capacidade de oferecer controle preciso de velocidade e torque.
Dentro desta categoria você encontra o motor de indução permanente, que utiliza ímãs permanentes no rotor, e o motor de indução controlado, que permite variar a velocidade de forma controlada.
2. Motores de corrente alternada (CA)
Os motores CA são alimentados por uma fonte de corrente alternada. Esses motores são extremamente comuns em muitas aplicações industriais e domésticas devido à sua simplicidade de design e baixo custo. Este tipo de motor é o mais utilizado em veículos elétricos, especificamente no motor síncrono de ímã permanente de corrente alternada.
Os motores CA podem ser subdivididos em várias categorias, incluindo:
- Motor universal: Este tipo de motor pode operar tanto com corrente contínua como com corrente alternada. Eles são caracterizados por sua alta velocidade e capacidade de fornecer alto torque.
- Motor Síncrono: Neste tipo de motor, a velocidade do rotor é sincronizada com a frequência da corrente alternada fornecida. São utilizados em aplicações que exigem velocidade constante e precisa, destacando-se seu uso em carros elétricos.
- Motor assíncrono (Indução): Também conhecido como motor de indução, este tipo de motor é o mais utilizado em aplicações industriais e comerciais devido ao seu baixo custo e robustez.
Além dessas classificações mais tradicionais, surgiram motores mais modernos que atendem a necessidades específicas em diversas aplicações, como motores de passo, que são utilizados em sistemas de posicionamento e controle de precisão, e motores lineares, que oferecem movimento linear direto em local giratório.
Como funciona um motor elétrico?
O funcionamento de um motor elétrico varia dependendo do tipo de motor do qual faz parte.
Operação de um motor de corrente contínua com indução permanente
O motor de corrente contínua é o motor mais simples. Indo de fora para dentro do motor encontramos:
- A carcaça ou cárter, que possui sistema de fixação à bancada ou chassi. No cárter existe um conjunto denominado estator ou indutor que é composto por um suporte de chapa metálica e alguns ímãs ou eletroímãs.
- O rotor, que é formado por um núcleo de chapas sobre um eixo que sustenta tudo. O eixo é cercado por uma série de enrolamentos que estão conectados às aletas do coletor. A corrente elétrica é recebida pelas aletas do coletor. Tudo isso é sustentado pelos rolamentos nas extremidades do cárter.
- De um lado do eixo está a polia. A polia é uma coroa dentada ou acoplamento que transmite a energia mecânica a ser utilizada.
Quando a corrente é enviada pelas escovas até o coletor, uma corrente elétrica passa pelos condutores das bobinas, que, pela regra da mão esquerda (lembre-se que estão imersas no campo do estator), cria uma força lateral, e a soma de todos eles nos dá o torque que faz girar o conjunto do rotor ou motor. Através do coletor, a corrente é fornecida às bobinas apropriadas para que este par seja o mais forte possível. São os motores que estão em dispositivos alimentados por células ou baterias.
Motor DC com indução variável e corrente alternada universal
É igual ao motor de indução permanente, mas neste caso o que produz o campo são bobinas que funcionam como um eletroímã, e são ligadas ao rotor em série ou paralelo. Este motor também funciona com corrente alternada monofásica. O exemplo mais comum são os motores de eletrodomésticos normais.
motor elétrico de corrente alternada assíncrono
Em um motor assíncrono, existem três grupos de enrolamentos no estator. Esses enrolamentos correspondem às três fases da corrente alternada comercial, e o rotor, ao invés do coletor, possui três anéis, que são conectados aos enrolamentos do rotor. Este tipo de motor elétrico funciona pelo mesmo princípio, embora devido ao deslocamento entre as fases seja produzido um campo rotativo que de certa forma arrasta o rotor.
Um caso particular muito utilizado é o do motor de gaiola de esquilo, por se tratar de um motor muito simples. Em que as finas e os enrolamentos do rotor são substituídos por hastes com anéis nas extremidades unindo as hastes, daí seu nome.
Nos motores assíncronos de corrente alternada, os enrolamentos podem ser conectados de duas formas: Estrela, quando uma extremidade das bobinas é comum e a outra conectada a cada uma das fases. A outra é triangular, quando as pontas das bobinas estão conectadas entre si e na mesma fase. A troca de duas fases provoca a inversão do sentido de rotação.
É o motor mais utilizado na indústria, com sistema de partida estrela-triângulo.
Motor elétrico CA síncrono
O motor síncrono é assim chamado porque a velocidade de rotação está relacionada à frequência da corrente de alimentação. Essa característica se deve ao fato do rotor ser alimentado com corrente contínua e ser acionado pelo campo rotativo produzido pelas bobinas do estator.
Normalmente este motor de corrente alternada possui um dínamo acoplado ao mesmo eixo do motor para alimentar o rotor. Como a velocidade varia com a frequência e permite ajustar o torque do motor com mínimo consumo, por ser acoplado a um oscilador sua velocidade pode ser variada com muita facilidade, sendo por isso utilizado em sistemas de tração (AVE-TGV).
Motor de passo
O motor de passo é alimentado com corrente contínua, e o rotor contém uma série de ímãs permanentes, que são arrastados pelas bobinas do estator, que são governadas pela eletrônica de potência, determinando o ângulo de rotação, que possuem controle proporcional. o ângulo de rotação ou posição. Esses motores são amplamente utilizados em servos de movimento de máquinas de controle numérico ou em motores de leitura/gravação de discos rígidos de computador.
Motor linear
Basicamente, um motor linear é um motor assíncrono que foi desenvolvido, portanto ao invés de criar um torque rotativo, ele cria um deslocamento linear, pelo deslocamento das fases. Esses motores são divididos em dois grandes grupos:
- Os de aceleração lenta usados no transporte Sky Train, Maglev, etc.
- OF aceleração rápida usada em armas como o canhão magnético e dispositivos espaciais.
Dentro da mesma categoria estão as bombas de indução eletromagnética que permitem a circulação de fluidos condutores. Os primeiros testes foram feitos com mercúrio, depois com mistura de sódio e potássio, tendo em vista a circulação de sódio para resfriamento em algumas usinas nucleares.
Eficiência e desempenho
 A eficiência e o desempenho dos motores elétricos são aspectos críticos que impactam a sua aplicabilidade, os custos operacionais e a sua pegada ambiental. Os principais conceitos relacionados à eficiência e desempenho desses motores são examinados abaixo:
A eficiência e o desempenho dos motores elétricos são aspectos críticos que impactam a sua aplicabilidade, os custos operacionais e a sua pegada ambiental. Os principais conceitos relacionados à eficiência e desempenho desses motores são examinados abaixo:
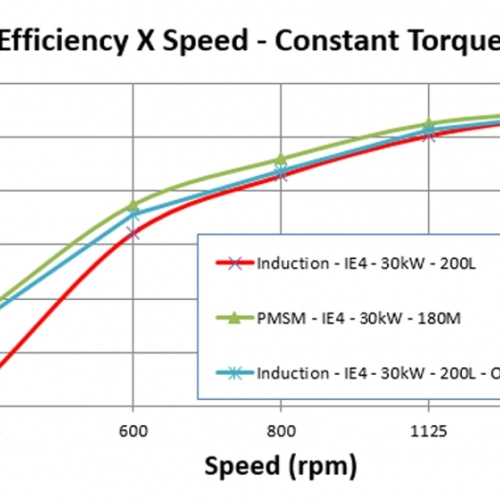
- A eficiência energética é definida como a relação entre a potência útil de saída e a potência elétrica de entrada, determinando a capacidade do motor de converter energia elétrica em trabalho mecânico. Os motores modernos são projetados para atingir altos níveis de eficiência e, ao mesmo tempo, reduzir o consumo de energia.
- Apesar dos avanços no design, os motores ainda sofrem perdas , incluindo resistência elétrica nos enrolamentos (perdas de cobre), histerese e correntes parasitas em materiais magnéticos, perdas mecânicas devido ao atrito e cargas inerciais, bem como perdas em rolamentos. Minimizar essas perdas é essencial para melhorar a eficiência.
- A curva de eficiência mostra que os motores atingem seu valor ideal perto de sua carga nominal, diminuindo sua eficiência em cargas mais baixas ou mais altas.
Os fabricantes buscam constantemente melhorias de eficiência , como o uso de materiais condutores de alta pureza, design aerodinâmico de rotores e estatores e tecnologias de controle avançadas para otimizar o desempenho em tempo real.
Por outro lado, para impulsionar a adopção de motores mais eficientes, muitas regiões estabeleceram regulamentos e normas que impõem requisitos mínimos de eficiência. Estas regulamentações, como as classificações de eficiência energética da EPA e da Comissão Europeia, incentivam a adoção de tecnologias mais eficientes, contribuindo para a redução do consumo de energia e das emissões de carbono.
História dos motores elétricos
Em 1821, após a descoberta do fenômeno do eletromagnetismo pelo químico dinamarquês Hans Christian Ørsted, o físico inglês Michael Faraday construiu dois dispositivos para produzir o que chamou de rotação eletromagnética. Esses dispositivos consistem no movimento circular contínuo de um campo magnético em torno de um fio. Ao fazer a demonstração, a primeira descrição foi a do motor elétrico de corrente alternada, patenteado em 1887 pelo físico sérvio Nikola Tesla.
Em 1822, Peter Barlow criou a roda Barlow. A roda de Barlow é um widget que consiste em um disco metálico cortado em uma estrela, as extremidades da estrela estão submersas em um espaço de ar contendo mercúrio. A função do mercúrio é garantir a passagem da corrente.
O primeiro switch utilizável foi inventado em 1832 por William Sturgeon. Mais tarde, em 1834, o Sr. Thomas Davenport fez um motor de corrente contínua com esta invenção. O motor de corrente contínua foi patenteado em 1837. O alto custo das baterias não permitiu que esses motores elétricos tivessem um sucesso inicial significativo.
Não está muito claro quem é o pai das máquinas assíncronas. Este título é disputado por três inventores: Nikola Tesla, Galileo Ferraris e Michail Ossipowitsch.
Em 1887, o físico Nikola Tesla registrou a patente da máquina assíncrona. No ano seguinte, ele registrou mais 5 patentes para máquinas elétricas assíncronas. Enquanto isso, Galileo Ferraris publicou tratados sobre máquinas rotativas.
Em 1885, Ferraris publicou um experimento e posteriormente publicou uma teoria sobre o motor assíncrono em abril de 1888. Finalmente, em 1889, um eletricista alemão de origem russa chamado Michail Ossipowitsch Doliwo-Dobrowolski inventou o primeiro motor assíncrono trifásico em gaiola de esquilo. Este último motor elétrico foi construído industrialmente a partir de 1891.